A private hobbyist website
with focus on CNC, electronics and software.
Simple µC-OS
Preface
This article describes the (very) simple operating system I use in my small microcontroller projects. "Operating system" is a definitely exaggerated but this might be interesting for somebody anyway.
It is a cooperative multitasking os. This means, that each task currently controlling the cpu must give back control to the other tasks or the cpu freezes (or resets if the watchdog is enabled). This is implemented with state machines and software timers within the tasks and not scope of this article.
I used this principle on Motorola (now Freescale) HC12, Renesas R8C, M32C and Microchip 16Fx and never had the need for a pre-emptive os.
Example sourcecode
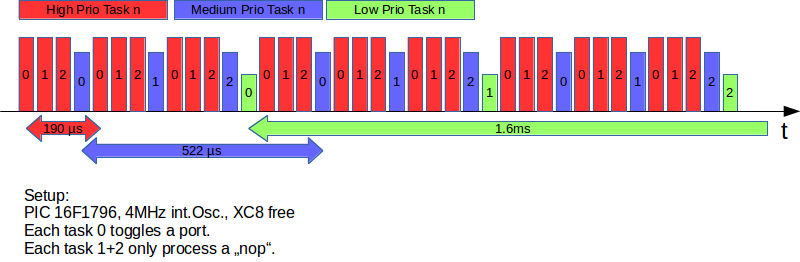
The following source code shows the main system loop and nine included tasks. I used it to measure the speed of the os without any load on the micro. In other words, the programm just toggles three ports and executes some 'nop' as fast as possible.
#include "mcc_generated_files/mcc.h"
#include "defs.h"
#include "swt.h"
void MAIN_TaskHighPrio0(void);
void MAIN_TaskHighPrio1(void);
void MAIN_TaskHighPrio2(void);
void MAIN_TaskMediumPrio0(void);
void MAIN_TaskMediumPrio1(void);
void MAIN_TaskMediumPrio2(void);
void MAIN_TaskLowPrio0(void);
void MAIN_TaskLowPrio1(void);
void MAIN_TaskLowPrio2(void);
typedef void (*T_FKTPTR)(void);
const T_FKTPTR MAIN_func_high[] = {&MAIN_TaskHighPrio0,&MAIN_TaskHighPrio1,
&MAIN_TaskHighPrio2};
const T_FKTPTR MAIN_func_medium[] = {&MAIN_TaskMediumPrio0,&MAIN_TaskMediumPrio1,
&MAIN_TaskMediumPrio2};
const T_FKTPTR MAIN_func_low[] = {&MAIN_TaskLowPrio0,&MAIN_TaskLowPrio1,
&MAIN_TaskLowPrio2};
const unsigned char MAIN_FUNC_HIGH_ENTRIES = sizeof (MAIN_func_high) / sizeof (T_FKTPTR);
const unsigned char MAIN_FUNC_MEDIUM_ENTRIES = sizeof (MAIN_func_medium) / sizeof (T_FKTPTR);
const unsigned char MAIN_FUNC_LOW_ENTRIES = sizeof (MAIN_func_low) / sizeof (T_FKTPTR);
void main(void)
{
// initialize the device
SYSTEM_Initialize();
INTERRUPT_GlobalInterruptEnable();
INTERRUPT_PeripheralInterruptEnable();
//INTERRUPT_GlobalInterruptDisable();
//INTERRUPT_PeripheralInterruptDisable();
//infinite system loop
static unsigned char low;
static unsigned char medium;
static unsigned char high;
while (1) {
for (low = 0; low < MAIN_FUNC_LOW_ENTRIES; low++) {
for (medium = 0; medium < MAIN_FUNC_MEDIUM_ENTRIES; medium++) {
for (high = 0; high < MAIN_FUNC_HIGH_ENTRIES; high++) {
MAIN_func_high[high]();
}
MAIN_func_medium[medium]();
}
MAIN_func_low[low]();
}
}
}
void MAIN_TaskHighPrio0(void) { LATC5 ^= 1; }
void MAIN_TaskHighPrio1(void) { asm("nop"); }
void MAIN_TaskHighPrio2(void) { asm("nop"); }
void MAIN_TaskMediumPrio0(void) { LATC6 ^= 1; }
void MAIN_TaskMediumPrio1(void) { asm("nop"); }
void MAIN_TaskMediumPrio2(void) { asm("nop"); }
void MAIN_TaskLowPrio0(void) { LATC7 ^= 1; }
void MAIN_TaskLowPrio1(void) { asm("nop"); }
void MAIN_TaskLowPrio2(void) { asm("nop"); }
Used ressources
These figures also include the system initialisation, interrupt manager, tmr0 interrupt, software timer and the pin manager.
- Program space used 101h ( 257) of 2000h words ( 3.1%)
- Data space used 14h ( 20) of 400h bytes ( 2.0%)
- EEPROM space used 0h ( 0) of 100h bytes ( 0.0%)
- Data stack space used 0h ( 0) of 31Ch bytes ( 0.0%)
- Configuration bits used 2h ( 2) of 2h words (100.0%)
- ID Location space used 0h ( 0) of 4h bytes ( 0.0%)
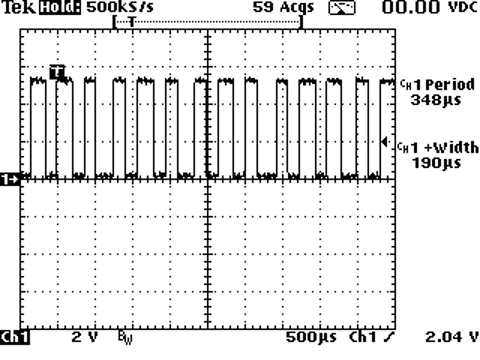
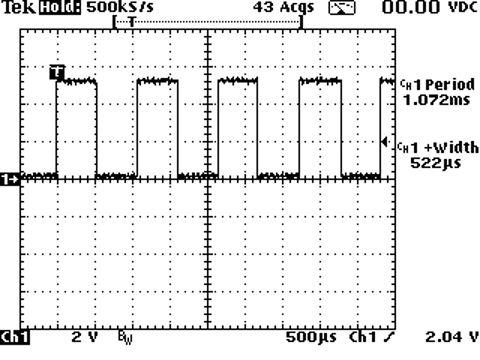
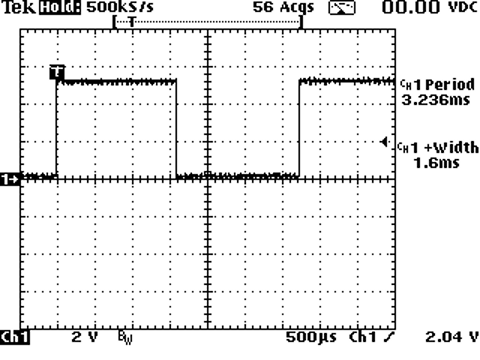
Measurements
The following screen shots show the measurements and a schematic overview of the timing of the source code above. There was as 1 ms timer interrupt running in the background, but that should not had to much impact on the measurement.
Other constraints:
- Microntroller: PIC16F1796
- Compiler: Microchip XC8 free
- Oscillator: 4 MHz internal
Publish date: 2014-09-14
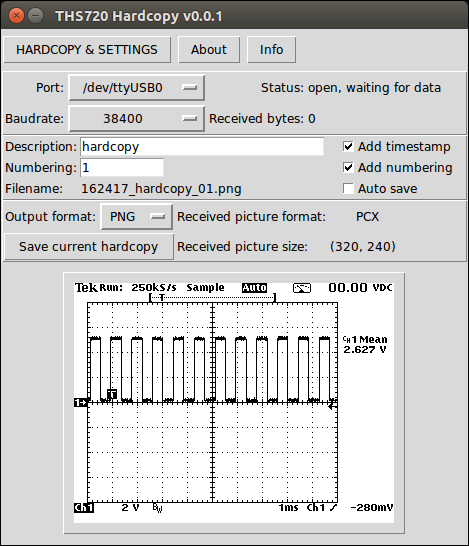
Tektronix THS720 hardcopy
This tool lets you receive the hardcopy from a THS720 oscilloscope via the serial port and save it to a file. It is only tested with a THS720 but might work with others of this series too.
Features
- Output formats: PNG, PCX, TIFF, BMP, GIF, JPG.
- Automatic filename generation and saving.
Requirements
- Ubuntu Linux 14.4 or compatible.
- Tektronix THS720 or compatible.
- A serial port.
- ImageTk library
Other compatible scopes
- TDS210 (Thanks to M.B. for the info)
Screenshots
Download
- ths720_hrdcpy_v0.0.1.py
- MD5SUM: 29f5a512f6af91d3e9e5d6ec08e7da3b
Publish date: 2014-06-29
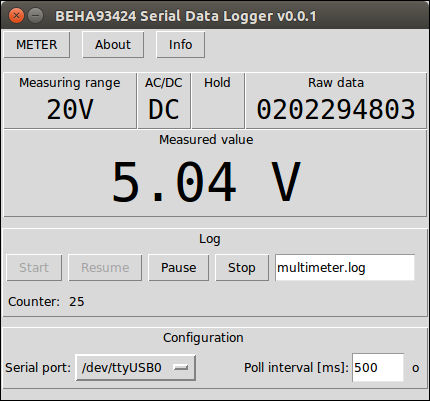
BEHA 93424 Serial Data Logger
This small Python program is a simple substitute for the Windows software that was shipped with my multimeter about 20 years ago. The program is written for Linux but should run on Windows too with some minor modifications concerning the serial port.
Since the technical support from BEHA/Fluke could not provide any software or technical specification of the communication protocol, I sat down and decoded the essential part of the communication protocol. That job was quite annoying but succeeded at last.
Please provide feedback if you use the program.
Features
- Displays the currently measured value.
- Displays the current multimeter settings.
- Logging of the measured values to a file (tab seperated).
- Adjustable polling and logging interval.
Requirements
- Ubuntu Linux 14.4 or compatible.
- BEHA 93424 multimeter or compatible.
- A serial port.
Screenshots
Download
- beha93424_sdl_v0.0.1.py
- MD5SUM: df61b5054dd0364da484b9a4dc524b6a
Publish date: 2014-06-23
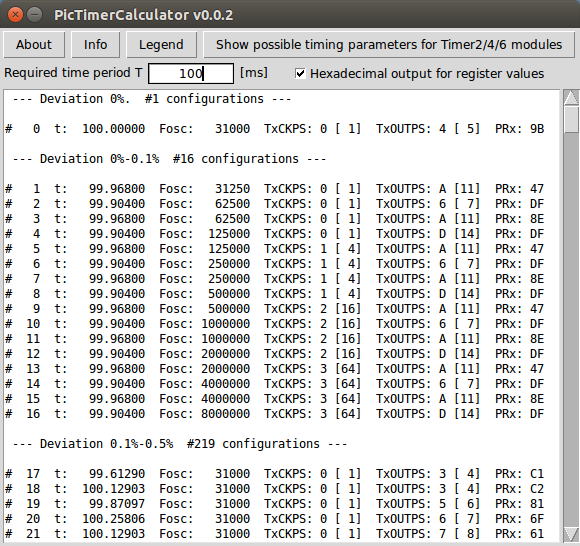
PIC timer calculator
This little accessory helps finding the right parameters for the timer modules 2/4/6 of Microchip PICs. Just type in the required time period for the timer and let the computer do the calculation. I "tested" it on a PIC16F1825.
Features
- The user is only asked for the required time period.
- It simply calculates all possible timer periods and outputs the closest parameters.
- If available it finds the parameters for 0% deviation.
- ... 0% to 0.1% deviation.
- ... 0.1% to 0.5% deviation.
- and 0.5% to 1.0% deviation.
- Values for the system oscillator or pre- and postscalers can easily be modified in the sourcecode.
Screenshots
Download
- PicTimerCalculator_v0.0.2.py
- MD5SUM: 82f5d0e8571e616da972e76181bafe39
Publish date: 2014-05-17
Last update: 2014-06-09
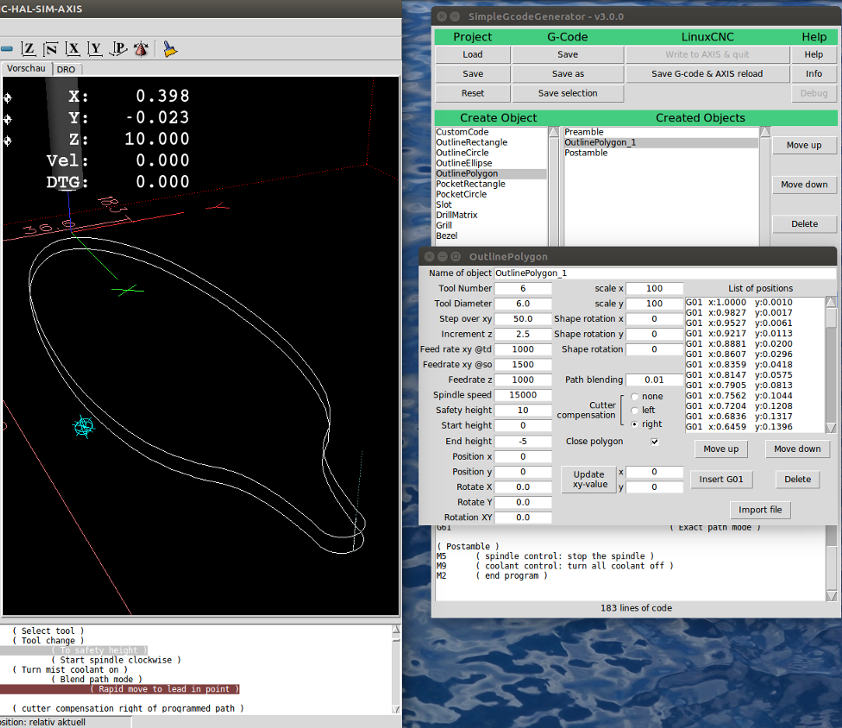
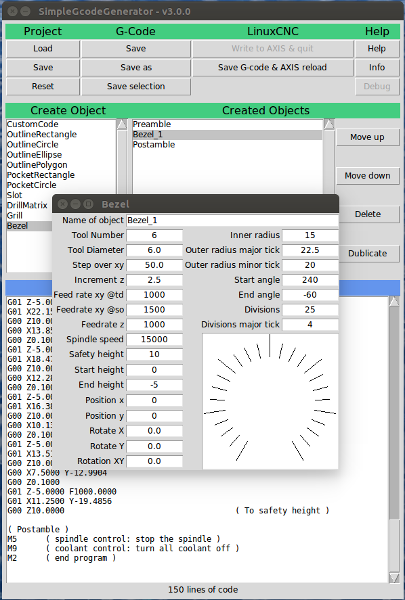
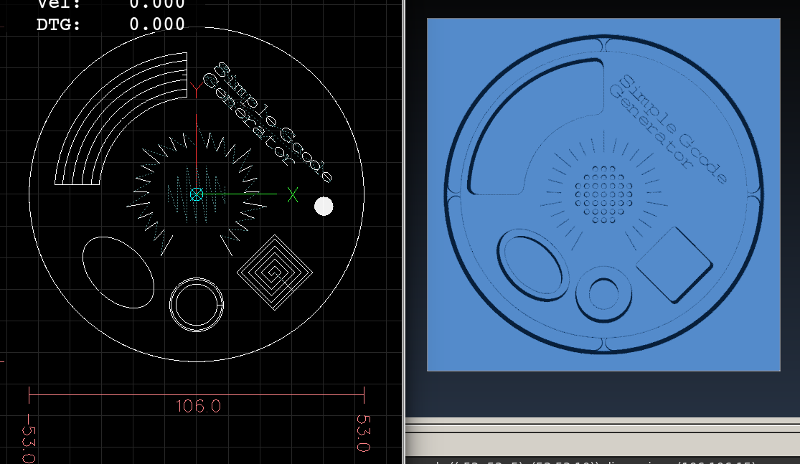
SimpleGcodeGenerator
This g-code generator for milling is a Python program with focus on the use with LinuxCNC.
For hobbyist use only. Do not expect a perfect finish and simulate the generated g-code before milling!
G-Code features
- Include custom g-code
- Outline: rectangle, circle, circular arc, ellipse, polygon (e.g. from airfoil data files)
- Pocket: rectangle, circle, circular arc, slot, counterbore
- Drilling: matrix, grill (rectangle, circle, oval)
- Engraving: bezel, text (cxf-fonts)
- Include LinuxCNC subroutines
System requirements ("Tested" configurations)
- i7-4712MQ 8GB, Ubuntu Linux 16.04 (precise) 4.4.0-72-generic (64-Bit), Python 2.7.12, LinuxCNC 2.8.0~pre1 Simulation
- Atom330 1GB, LinuxCNC-2.7 wheezy, Python 2.7.12, LinuxCNC 2.7.8
Screenshots

Changelog
- 3.6.0
Bugfix main gui: Selection of list-objects was discarded.
Added feeds and speeds frame.
Paths are now read from ini-file.
Default values are now read from ini-file.
Added a pdf manual.
Better filename handling.
Some minor bugfixes and optimisations. - 3.5.0
Added the ncclass "Subroutine" which makes is possible to include LinuxCNC subroutines.
Removed check if AXIS is running to reduce computing ressources.
Some minor bugfixes. - 3.4.0
Uses less computing resources.
Faster display of edit frames.
Added tool selection from LinuxCNC tool table.
Added dialog to edit object specific pre- and postamble.
Some minor bugfixes.
Download
- SimpleGcodeGenerator3.6.0.tar
- MD5SUM: f71e47c4eae4960a379d58a5c46f2456
Publish date: 2014-01-02
Last update: 2017-08-14
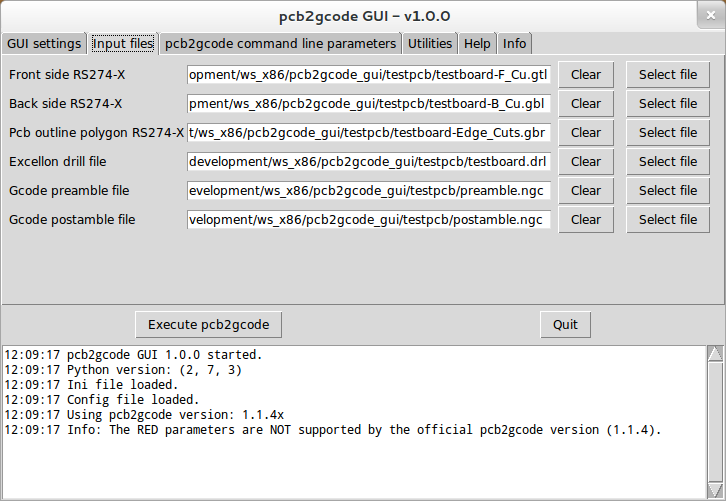
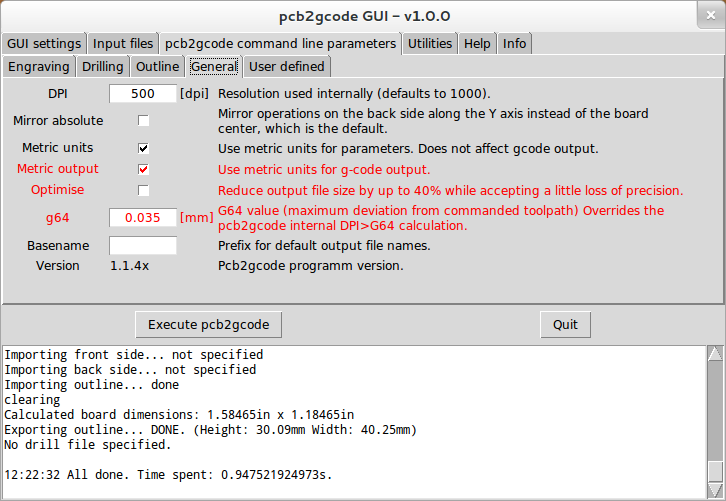
pcb2gcode GUI
*** I recommend using FlatCAM instead >>> FlatCAM ***
The command line tool pcb2gcode is used to generate G-code from Gerber files. This GUI intends to ease the use of the tool.
This is my first Python program, so please do not be too stern concerning the source code. Have a look into the source code header for details.
This program is free software: you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation, either version 3 of the License, or (at your option) any later version.
Basic features
- Invokes pcb2gcode and passes the command line parameters to it.
- Supports metric and imperial input.
- Creates one ini file in the folder of the script to store the last working directory and last used configuration file.
- All pcb2gcode parameters can be saved in and loaded from a configuration file.
- A small utility helps to calculate the needed engraving depth (z-work).
- Supports the additional options (metric output, g64, optimise, bridges, onedrill, cut front) of my development branch of pcb2gcode.
If you are interested, the code is available on git as a fork of the original repository: https://github.com/erik74/pcb2gcode.git.
System requirements ("Tested" configurations)
- Ubuntu Linux 12.04 (precise) (32-Bit), 3.2.0-57-generic-pae, Gnome 3.4.2, Python 2.7.3, pcb2gcode 1.1.4, Screen resolution: 1920x1080
- Ubuntu Linux 10.04 (lucid), 2.6.32-122-rtai, Gnome 2.30.2, Python 2.6.5
Python ttk module 0.3.2. https://pypi.python.org/pypi/pyttk
pcb2gcode 1.1.4, Screen resolution: 1024x768
How to run
- Download the script.
- If you are using Python 2.6.5, you likely have to install the ttk module first: https://pypi.python.org/pypi/pyttk
- Make it executable and run it OR use your favourite Python IDE.
Screenshots

Feedback
Found a bug? Want to contribute? General feedback? Please let me know.
At this point, thanks for the useful feedback I got so far. Keep it up!
Latest changes
- Added error handling for empty standard parameters.
- Removed inactive code.
- Bugfix: Input files for pcb2gcode containing space characters did not work.
Thanks to Demetris for the bugreport and fix.
The complete version history is included in the header of the source code.
Download
- pcb2gcode_gui_v1.0.1.py
- MD5SUM: 0c5882f69d3a21e4d611e014788692dd
Publish date: 2013-02-03
Last update: 2014-04-06
Links
FlatCAM - Free and Open-source PCB CAM
python.org - The Python programming language
Unicodetables - ASCII + Unicode tables
Last update: 2014-04-27